MIT出品的自动驾驶船,你敢坐吗?
本文来自微信公众号:大数据文摘(ID:BigDataDigest),作者:牛婉杨,原文标题:《MIT自动驾驶船下水!可搭载6人过河,误差不到0.17米,北大博士毕业生担任一作》,题图来自原文
一转眼,百度无人车已经在北京开放运营半个月了。试乘火爆,据悉,仅10月12日当天,Apollo GO自动驾驶出租车约车订单就累计达到了2608单。
作为最贴近我们生活的人工智能场景之一,自动驾驶技术一直备受关注,从谷歌Waymo到国内的百度和滴滴,都在加紧研发推进。
不过你有没有想过,能否把自动驾驶技术应用在船上呢?
还真有!近日,麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员称,他们已经创造了一种可以自主移动的自动驾驶船,它能够在搭载乘客过河,即使是在湍急的水流中也能保持稳定前行,研究人员还给这款船起了个有趣的名字——Roboat II。
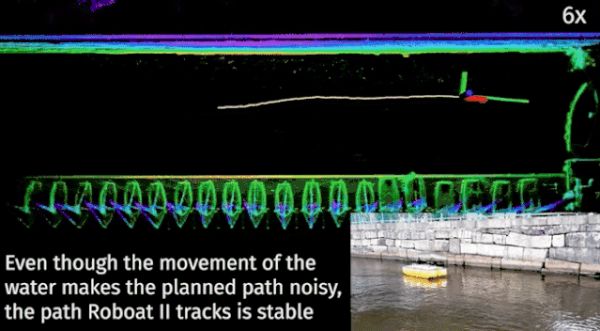
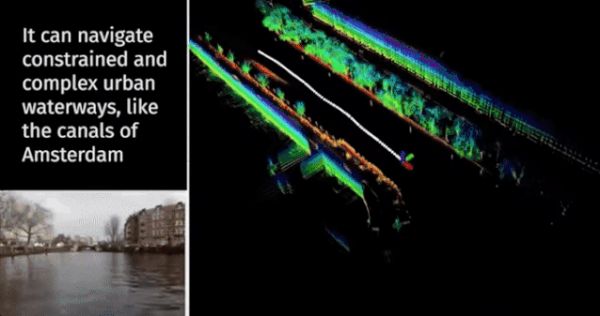
Roboat是一个为期5年的研究项目,研究人员的初衷是希望通过这些自主驾驶船来改造阿姆斯特丹的运河,比如可以用它来收集水上垃圾、运送货物或人员。
别看上图中它的样子有些“寒酸”,这只是个雏形~ 未来它周围会安上围栏,一次最多能承载6人呢!

目前,这篇研究已经在国际智能机器人与系统会议上展示,值得一提的是,这篇Roboat II 最新论文的一作王伟是来自北大的一名博士毕业生。
能拣垃圾能载人,还能“手拉手排排走”,船只合体依旧转弯自如
Roboat II 是由CSAIL、麻省理工学院感知城市实验室和阿姆斯特丹先进都市解决方案研究所(AMS)在过去五年中开发的自主驾驶船的最新成员。
五年前,该项目刚刚开始的时候,使用的还是一米长的船只,只能在游泳池和运河中。现在它正在向更大的船只发展。
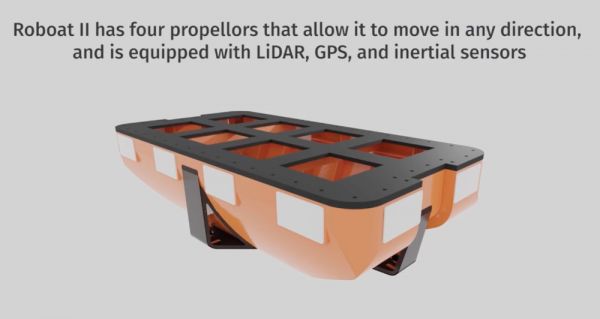
Roboat II 长2米(6英尺),重50公斤(110磅),可搭载4~6名乘客,被MIT称为“Covid-friendly”,因为它足以使乘客之间保持隔离距离。它可以不到0.17米(7英寸)的误差,在阿姆斯特丹运河上航行3个小时。
长方形的船体包裹着传感器、推进器、微控制器、摄像机和其他硬件。
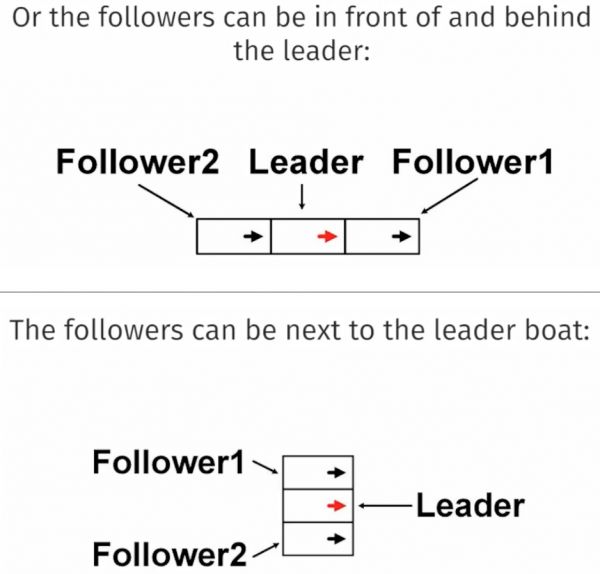
研究人员的目标是创造出能在阿姆斯特丹160多条运河中运送人和货物的机器船队,他们还希望这些船只能够自主“变换队形”,比如船只可以“串联”或“并联”在一起,以帮助减少行人拥堵。
他们也对此进行了实验,实验设定无论是船只“串联”还是“并联”在一起,都是中间的船负责领导船队运行的方向和轨迹。
研究人员展示了10倍速下的实验过程,左侧两个坐标图显示的是结构的轨迹和方向,其中紫色和蓝色轨迹代表实验组;右侧三个坐标图显示的是机器船只的力和力矩,其中红色轨迹代表领队船只。
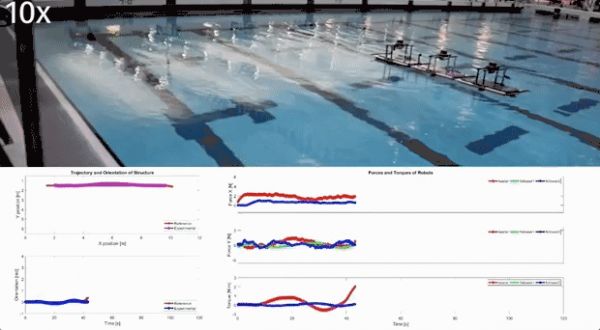
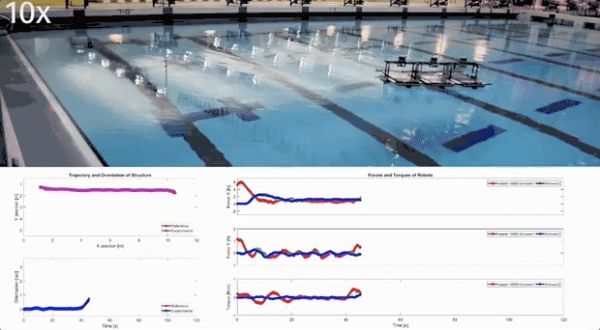
结果显示,船体小组能够在两种配置中完成不同轨迹和方向的行驶,其中Follower的力量大小对整个船组有积极的贡献,这表明Follower可以帮助中间的Leader船只行驶或变换方向。
船体之间无需通信,跟随者可预估领队意图并调整自己移动轨迹
与上一代船体机器人相比,Roboat II 改进了同步定位和映射算法(SLAM)、以及基于模型的最优控制器(非线性模型预测控制器)和基于优化的状态估计器(移动地平线估计)。
通过运行SLAM算法,利用激光雷达和GPS传感器,以及用于定位、姿态和速度的惯性测量单元,船只可以进行自我定位。控制器跟踪来自规划器的参考轨迹,规划器更新其路径以避开检测到的障碍。
通常每个Roboat上运行的分布式控制器需要连接结构的速度信息(以结构中心的速度表示),但Roboat II 知道自己相对于结构中心的位置。也就是说,Roboat II 的算法不需要相对位置,每个Roboat II 使用自己的速度,而不是结构中心的速度。
当领队 Roboat II 开始向给定的目的地移动时,另一个Roboat II 可以估计领队的意图并调整自己的移动轨迹。领队船还可以通过调整输入来引导Roboat II 的其余部分,而不需要两艘船之间进行任何通信。
研究人员计划在未来使用人工智能来估计Roboat的关键参数。他们还打算探索自适应控制器,当物体被放置在船上时,允许结构的动态变化。
论文一作来自北大博士毕业生,现在重点研究机器人的控制、感知和协调
这篇Roboat II 最新论文的一作王伟是来自北大的博士毕业生。
王伟是北京大学工学院谢广明教授的博士研究生,博士论文主要研究自主智能仿生机器人鱼。
在2015年,他和导师谢广明发表论文《Online High-Precision Probabilistic Localization of Robotic Fish Using Visual and Inertial Cues》,这篇文章针对计算能力有限、传感设备成本较低的微型水下机器人,提出了一种在线高精度概率定位方法;以及一种新的水下图像处理算法,以提高水下图像的质量。
2016年,二人再次发表关于仿生机器人鱼的论文《Online localization of freely swimming robotic fish》,这也是王伟的博士毕业论文。
2016年毕业后,他进入麻省理工学院进行博士后研究。现在,王伟是 MIT Senseable City实验室和CSAIL的高级博士后,也是MIT城市研究及规划学系的研究人员。
他的研究重点是机器人的控制,感知和协调。他也对无人驾驶车辆,受生物启发的机器人,软机器人和群机器人感兴趣。
在谈到 Roboat II 项目时他表示:“开发一种能够精确测绘、强健控制和载人运输的自主船系统,是使该系统在Roboat II上实现的关键一步。”“我们也希望这项技术最终能应用在其他船只上,让它们实现自主驾驶。”
相关报道:
https://venturebeat.com/2020/10/26/mit-csails-roboat-ii-is-an-autonomous-platform-large-enough-to-carry-human-passengers/
本文来自微信公众号:大数据文摘(ID:BigDataDigest),作者:牛婉杨
相关推荐
MIT出品的自动驾驶船,你敢坐吗?
自动驾驶出租车上路,你敢坐吗?
纽约飞到东京只需半个小时,马斯克的不锈钢飞船你敢坐吗?
高德联手滴滴之外27家网约车平台:承诺“敢坐敢赔”
自动驾驶正在驶向“封闭”
自动驾驶为什么会要了你的命
潮科技 | 告别“鬼探头”,MIT 开发出能够“绕视”拐角后方的感知系统
MIT脑洞研究:只听6秒语音,AI就知道你长什么样
MIT华人科学家打造线形机器人:灵活穿行脑血管,还能轻松急转弯
还记得你用的第一款智能手机吗?
网址: MIT出品的自动驾驶船,你敢坐吗? http://www.xishuta.com/newsview33197.html
推荐科技快讯







- 1问界商标转让释放信号:赛力斯 95792
- 2报告:抖音海外版下载量突破1 25736
- 3人类唯一的出路:变成人工智能 25175
- 4人类唯一的出路: 变成人工智 24611
- 5移动办公如何高效?谷歌研究了 24309
- 6华为 nova14深度评测: 13155
- 7滴滴出行被投诉价格操纵,网约 11888
- 82023年起,银行存取款迎来 10774
- 9五一来了,大数据杀熟又想来, 9794
- 10手机中存在一个监听开关,你关 9519



