学会扶墙的机器人:没有什么能让我倒下!
编者按:本文来自微信公众号“量子位”(ID:QbitAI),作者:明敏,36氪经授权发布。
人类在走路不稳或者对路况不熟悉的情况下,都会下意识地用手来扶住身边的支撑物以保持平衡。但对于双足机器人而言,这种技能才刚刚被解锁。
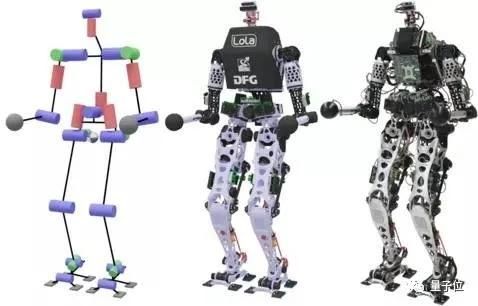
近日,德国慕尼黑工业大学开发的LOLA双足步行机器人又一次升级,实现了依靠上肢辅助的多触点移动(multi-contact locomotion)。
简而言之就是,双足机器人走路更像人类了。
比如,扶住墙壁“小心翼翼”地通过崎岖不平的路面。
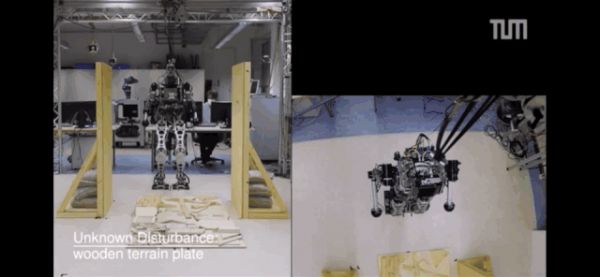
在遇到“陷阱”时,立刻用手臂扶住墙壁站稳。
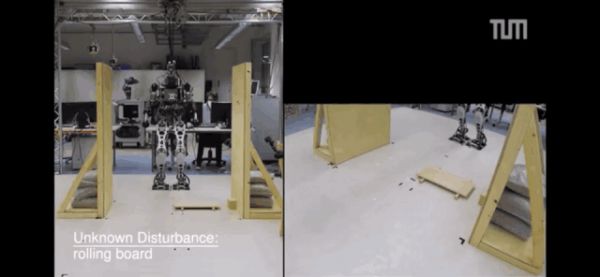
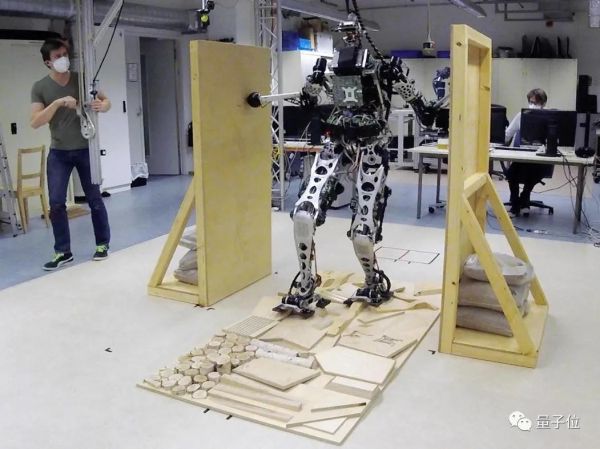
支撑住稳定的物体便不会被轻易推倒

在前进中顺势扶一下桌子稳定身体
 △像不像闪了腰的你(不是)
△像不像闪了腰的你(不是)
LOLA机器人进化史
其实早在2019年,LOLA机器人就实现了自主行走。
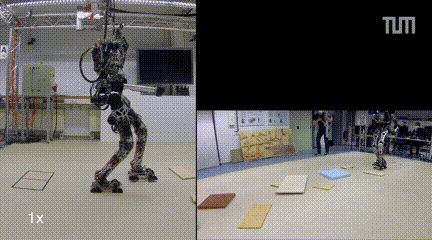
今年3月,它又实现了在不平整地面上自主行走,应对突发情况时还可快速做出反应。

这样看,扶墙前行似乎有些画蛇添足?
显然不是。在实际行走过程中,即便是人类也无法预判所有突发情况,当我们对前方路段判断失误时,就会需要上肢来辅助支撑身体保持平衡。如果没有上肢的辅助,那只有一个结果——摔个狗啃屎。
这就是为什么要使用多点支撑移动,对于人类来说这是一项非常有用的技能,于机器人而言亦是如此。
机器人扶墙,真的很难
越是有用的技能,往往难度越大。
想要双足机器人手臂扶墙移动还保持平衡,并不是看上去那么简单。因为这种情况下,机器人自身形成了超静定结构,在完成手臂扶墙后的瞬间,机体的受力结构发生了巨大的变化,想要继续保持平衡,便需要重新核算。
对此,研发人员首先对LOLA机器人的硬件进行了升级。
此前,LOLA机器人的双臂主要是用来弥补快速行走时双脚的动态效应。躯干设计相较简单,并不能承受在多触点移动过程中由上臂“扶墙”带来的负荷。
为此,在这次升级中,科学家们重新设计了LOLA的上半身:从骨盆开始提高躯干的强度,对关键元件减轻重量并提高硬度,调整手臂关节设计及连杆长度以达到更多的工作空间。
软件方面,LOLA采用了层次性架构。
在最高层次上,视觉系统先生成一个环境模型,并估计场景中机器人的6D姿态。然后,行走模式生成器使用这些信息来规划一个动态模型,引导LOLA到预定的目标位置。
在较低层次上,稳定模块来进一步完善这个环节,以补偿模型或其他因素产生的误差,并保持整体的平衡。
长期目标
研发团队表示,LOLA机器人的一个长期科学目标是为了了解人类行走的必要元素和控制机制,它的腿部运动学设计和人体非常相似。
“我们与运动技能学的科学家们一起,试图找出目前为止人类步态行动与LOLA步态行动之间的异同。“
研发团队希望通过这项研究,一方面能为直立行走的控制机制提供新思路,另一方面能证明目前对人类步态的生物力学模型的理解是否正确。
虽然研究人员认为,双足机器人用双臂来辅助直立步态是非常合理的,但是展望未来,他们更期待双足机器人如何利用它们的四肢以非人类的方式移动。
参考链接:
[1]https://spectrum.ieee.org/automaton/robotics/humanoids/bipedal-robot-learning-to-move-arms-legs[2]https://www.mw.tum.de/en/am/research/current-projects/robotics/humanoid-robot-lola/
相关推荐
学会扶墙的机器人:没有什么能让我倒下!
苹果小米“变软”的尴尬:互联网服务营收迟迟扶不上墙
Facebook最新研究:4小时让机器人学会2千种操作
张丽俊:标语上墙,是文化落地的最后一步
百度拆掉玻璃墙
苹果接盘Drive.ai,明星无人驾驶公司倒下的背后
又一家明星机器人公司倒掉:曾是全球机器人技术50强,主打性价比AI机械臂
又一家明星机器人公司倒闭:曾是全球机器人技术50强,主打性价比AI机械臂
“悟空”倒下,知乎难安
陈昊自述:17年的优胜教育是怎么倒下的?
网址: 学会扶墙的机器人:没有什么能让我倒下! http://www.xishuta.com/newsview41287.html
推荐科技快讯






- 1问界商标转让释放信号:赛力斯 95792
- 2报告:抖音海外版下载量突破1 25736
- 3人类唯一的出路:变成人工智能 25175
- 4人类唯一的出路: 变成人工智 24611
- 5移动办公如何高效?谷歌研究了 24309
- 6华为 nova14深度评测: 13155
- 7滴滴出行被投诉价格操纵,网约 11888
- 82023年起,银行存取款迎来 10774
- 9五一来了,大数据杀熟又想来, 9794
- 10手机中存在一个监听开关,你关 9519



